OmniBin
4/21/2026
Self-sorting trash bin using computer vision, ML, and Data Collection. DTI 531 course project: AI in the Physical World.
PROJECT OVERVIEW
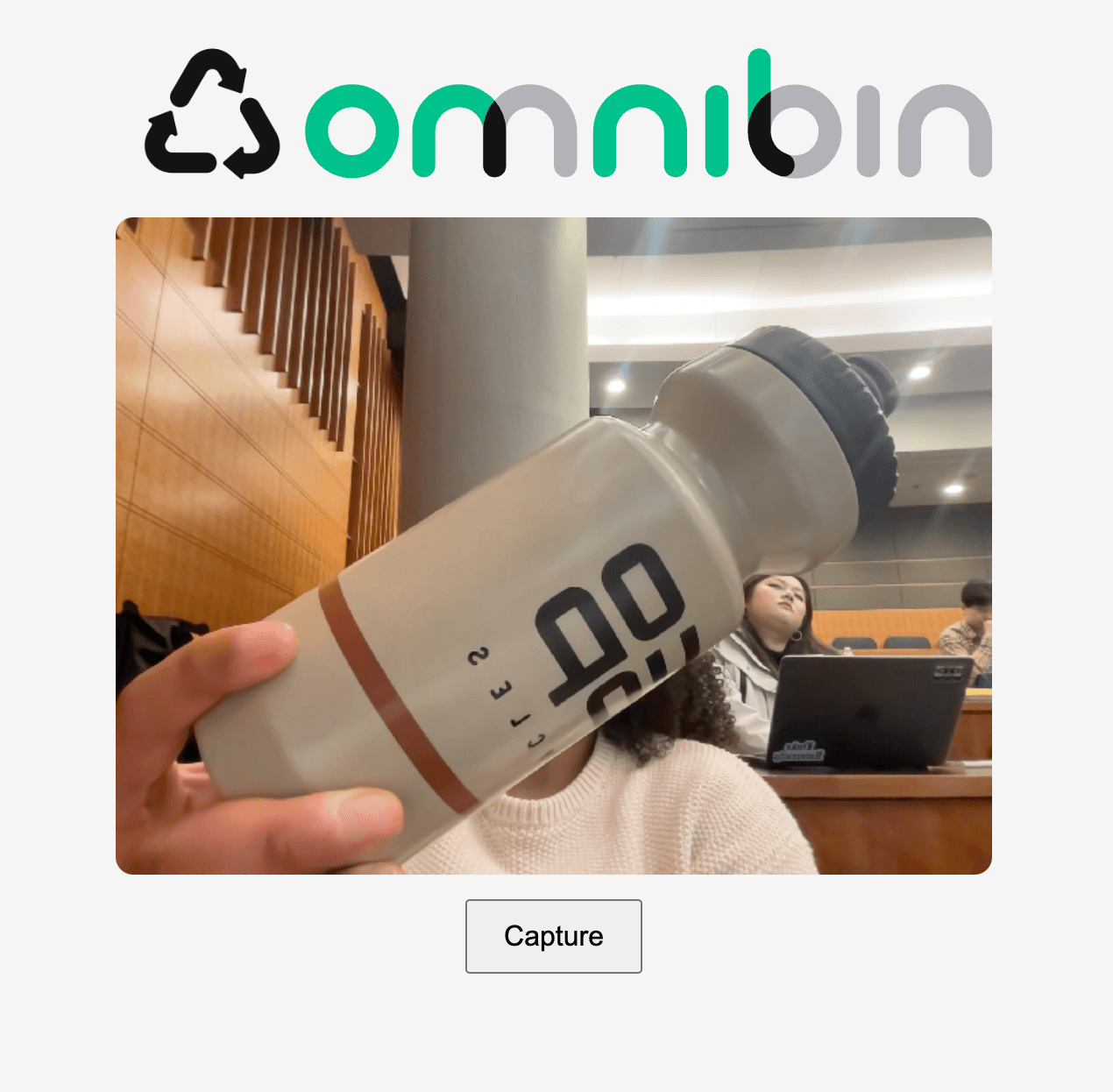
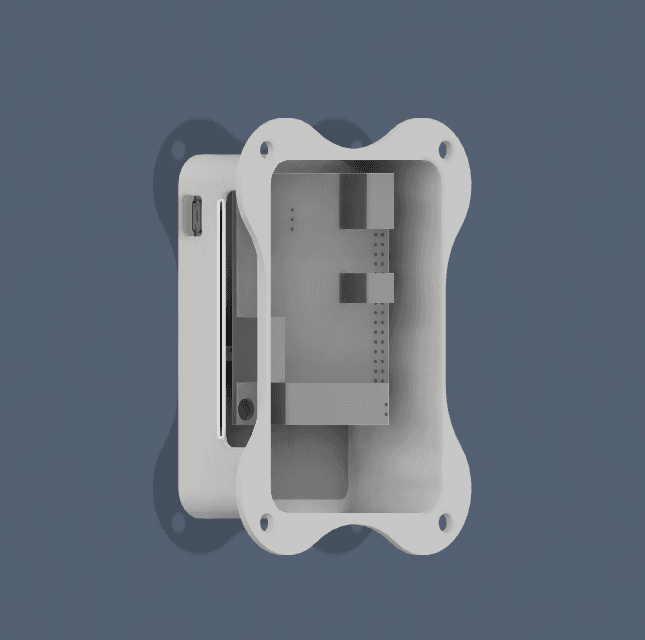
OmniBin is a computer-vision-aided waste classification and sorting machine that removes the guesswork from recycling. Using a Raspberry Pi, camera, stepper motor HAT, and two stepper motors, OmniBin automatically identifies waste placed in view of the camera, rotates a quadrant-divided bin to the correct category, and releases the item into the correct quadrant. AI edited images included for studio style quality*


Phase 1
Developed a training dataset of 1000+ images across 4 categories: Garbage, Plastic, Paper, and Metal using an opensource dataset. Trained a custom image classification model using Teachable Machine. Using a simple web app, a dev computer's webcam was used to test the model's predictions in real time, which were relayed to a MongoDB database. In anticipation of the physical build, stepper motor movement was simulated using a Python script that read the database and printed the predicted category. This was 531's midterm deliverable.
Phase 2
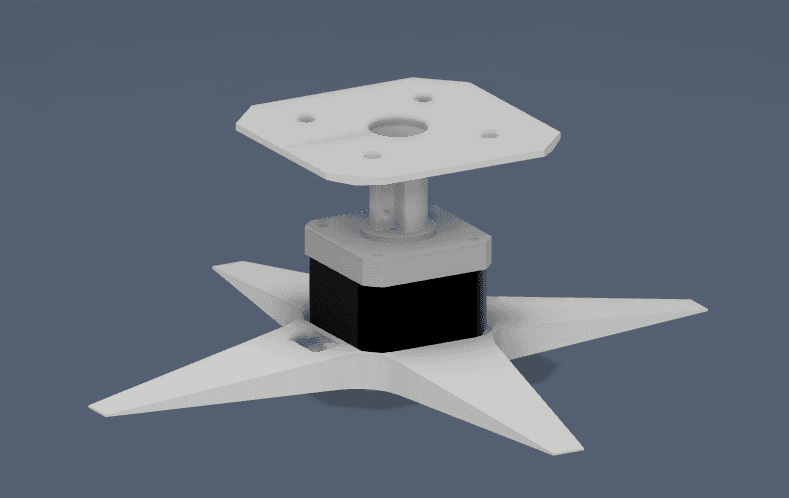
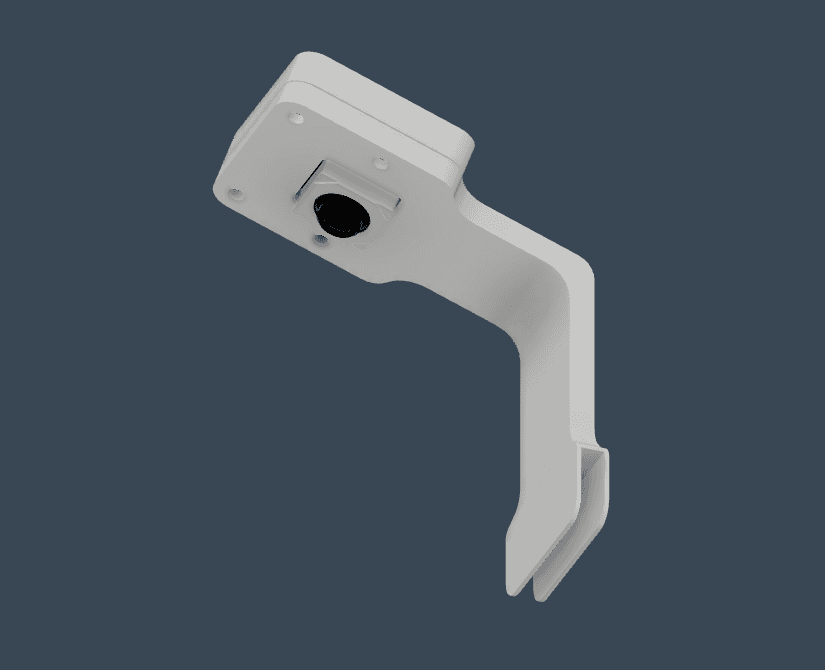
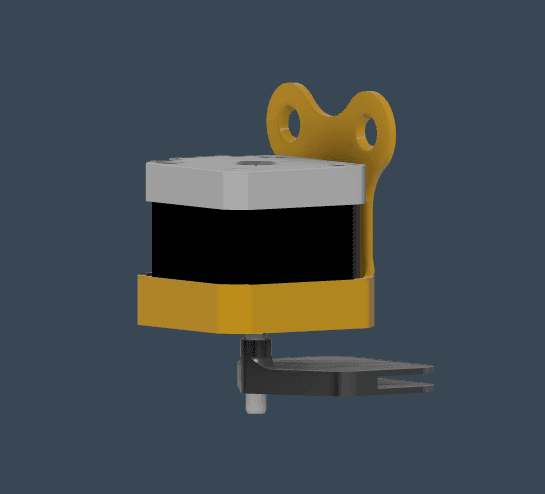
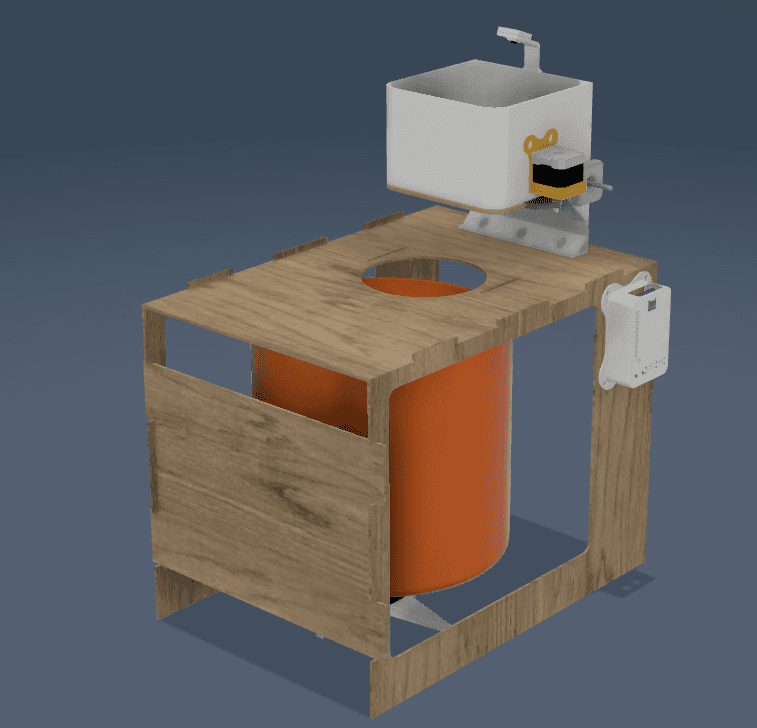
Prior to the start of building the final physical prototype, customer discovery, end-user personas, and use cases were developed to inform the design and functionality of the final product. After speaking with 8 people on Duke University's campus, I identified key pain points and opportunities for waste management improvement, especially regarding facilities personnel experience. In anticipation of the sensors and parts, a CAD model was created to visualize the final product.
Phase 3
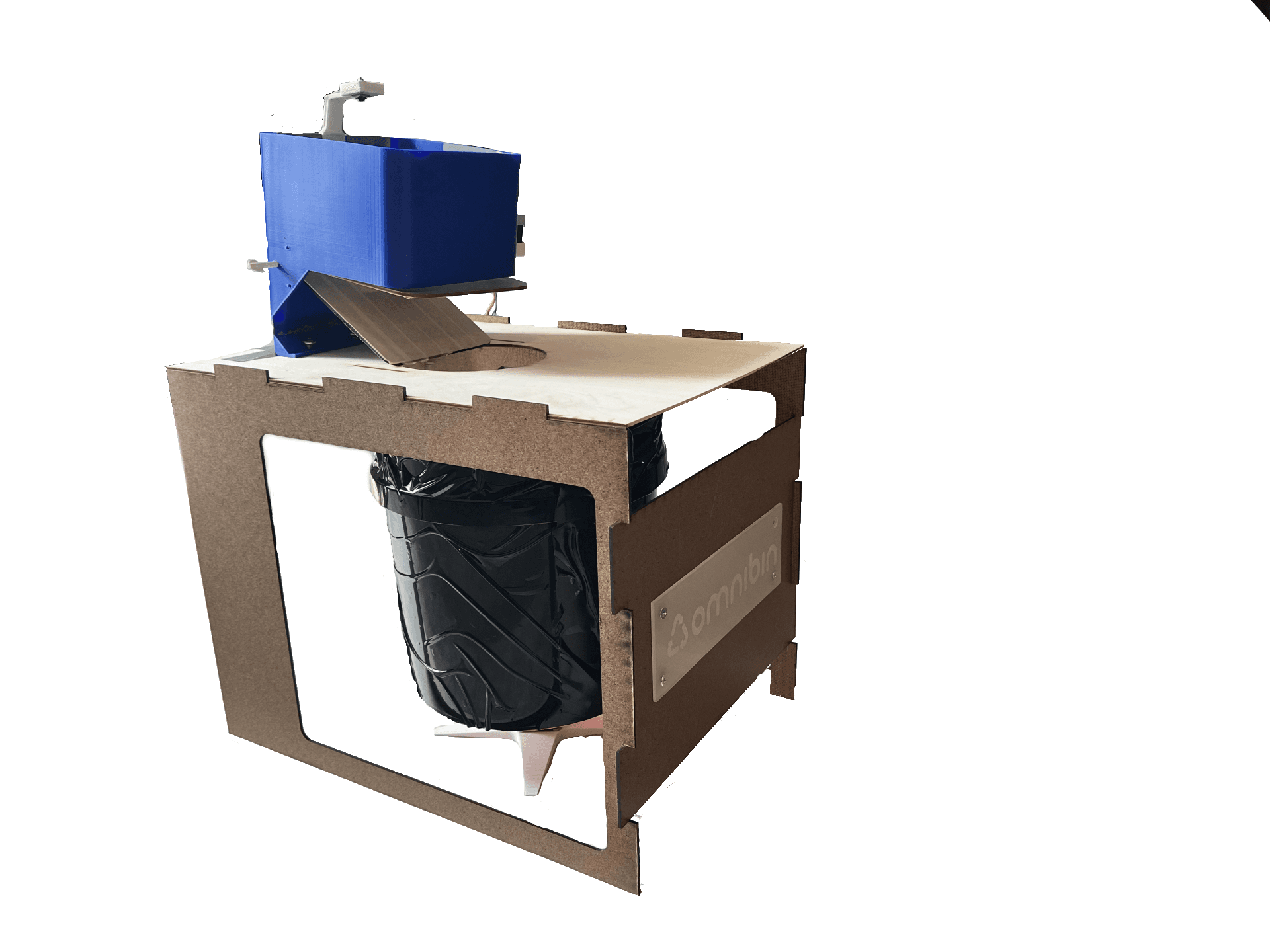
The final phase involved building the physical prototype. The Raspberry Pi was programmed to run the model on live camera feed and control the stepper motors based on the predictions. The bin was built using laser-cut MDF/plywood and 3D printed parts, designed to rotate a bucket and sort waste into four quadrants. Testing revealed areas for improvement in both the model's accuracy and the mechanical design. The final product successfully sorted waste with a reasonable degree of accuracy, demonstrating the potential for ML-assisted waste management solutions. Final Code Link.

Customer Case Study
A university campus installs OmniBin units in high-traffic areas where recycling contamination is a persistent issue and has been identified by the Office of Sustainability. Student, due to unclear labeling and the need for convenience, frequently mis-sort waste. OmniBin removed the decision entirely, items are automatically identified and sorted while the system logs accuracy, usage data, and each bin becomes smarter based on the trash it observes. Overtime facilities staff notice a reduction in contamination rates which allows them to optimize waste operations. OmniBin will start off as smart waste management for infrastructures like universities and offices, however, as the company grows, trash identification can move downstream and help with industrial level separation systems. OmniBin’s primary buyers are Universities, Corporate Offices, Airports, and Malls. OmniBins solve three problems which makes it compelling to customers and end-users: 1. it removes human error, 2. it reduces operational costs (contaminated recycling is often rejected), 3. it generates and collects data. At the price of $299 customers can save costs in recycling contamination, provide ESG reporting metrics, and compliance documentation. Most importantly, OmniBin does not intend to replace facilities staff, only reducing effort.
Reflections, Challenges & Future Iterations
Overall Project Reflection: This is personally compelling for two reasons, I believe strongly in sustainable design — design that either uses sustainable materials or instills sustainable actions. OmniBin does both. It builds a comprehensive database of waste materials and removes the need for choice from the end user helping waste management downstream.
Mechanism Reflections: There are a few design changes I would make to the physical system. The biggest is the trash chute. Instead of a 3D-printed extension off the wooden body, I would build the chute section directly from wood or MDF as part of the main structure. This would allow the second stepper motor to be mounted directly to the body and open a hatch from underneath, eliminating the strain the current chute puts on the motor and improving long-term reliability. Second, I would add lighting at the chute entrance to make sure it's uniform to help with the camera detection.